Laboratoř výkonové elektroniky a elektrických pohonů
|
Oddělení: Oddělení D 6 – Elektrotechnika a elektrofyzika Vedoucí: Ing. Radko Semerád |
|
Výzkum je zaměřen na aktuální problémy spojené s obvodovými strukturami výkonových elektronických měničů a algoritmy pro jejich řízení a diagnostiku. Analyzovány jsou vzájemné účinky měničů se stroji, které jsou z nich napájeny, a s napájecími sítěmi, ke kterým jsou připojeny. Jsou vyvíjeny a experimentálně testovány pokročilé řídicí algoritmy střídavých pohonů a víceúrovňových frekvenčních měničů. Jsou studovány způsoby, jak se vyhnout nepříznivým vysokofrekvenčním jevům (elektromagnetickému rušení) produkovaným polovodičovými měniči. V oblasti elektromagnetické kompatibility (EMC) v elektroenergetice se vyvíjejí řídicí algoritmy pro aktivní výkonové filtry, které kompenzují vyšší harmonické, nevyvážené zátěže, účiník a flikr, a jsou schopné regulovat energetické toky v distribučních a průmyslových sítích s využitím zařízení FACTS (Flexible AC Transmision Systems). Dále se laboratoř zabývá analýzou a modelováním elektrických pohonů a točivých strojů. Jsou analyzovány nejdůležitější způsoby přeměn energie mechanické na elektrickou a naopak. |
Ing. Martin Bejvl, Ph.D.
je v současné době výzkumným pracovníkem v Oddělení elektrotechniky a elektrofyziky. Získal doktorát. v oboru elektrotechnika na Českém vysokém učení technickém v Praze v roce 2017. Jeho výzkum se zaměřuje na strategie řízení víceúrovňových střídačů, měničů v trakčních aplikacích a měničů připojených k síti.
Ing. Jiří Janovec
je odborným pracovníkem v Oddělení elektrotechniky a elektrofyziky. Absolvoval elektrotechnickou fakultu ČVUT. Jeho úkolem je poskytovat technickou podporu při vývoji a zkouškách měničů elektrické energie a elektrických pohonů. Navrhuje a vyrábí prototypy zařízení a zkušební přípravky a provádí jejich testování a měření.
Ing. Petr Kokeš
je odborným pracovníkem v Oddělení elektrotechniky a elektrofyziky. Je absolventem elektrotechnické fakulty ČVUT. Zabývá se problémy spojenými s regulací střídavých motorů napájených z frekvenčních měničů, řízením víceúrovňových napěťových střídačů a měničů připojených k síti, včetně technické podpory při uvádění průmyslových zařízení do provozu.
Ing. Radko Semerád
je odborným pracovníkem v Oddělení elektrotechniky a elektrofyziky a vedoucím laboratoře Výkonové elektroniky. Je absolventem elektrotechnické fakulty ČVUT. Zabývá se topologiemi a řízením víceúrovňových střídačů a měničů připojených k síti. Také se věnuje experimentům a měřením na fyzikálních modelech měničů a pohonů.
Ing. Petr Šimek, Ph.D.
je v současné době výzkumným pracovníkem v Oddělení elektrotechniky a elektrofyziky. Získal doktorát. v oboru elektrotechnika na Českém vysokém učení technickém v Praze v roce 2016. Zabývá se strategiemi řízení víceúrovňových střídačů, metodami synchronizace sítě, měniči používanými v trakčních aplikacích a prediktivním řízením výkonových elektronických měničů.
prof. Ing. Viktor Valouch, CSc. (IEEE Senior Member, 1995)
je vedoucím výzkumným pracovníkem v Oddělení elektrotechniky a elektrofyziky. Od roku 2001 je profesorem na Fakultě elektrotechnické ČVUT v Praze. Mezi jeho výzkumné zájmy patří strategie pulzně šířkových modulací (PWM), teorie výkonů, prediktivní řízení výkonových elektronických měničů, aktivní a hybridní výkonové filtry a výkonová elektronika pro aplikace zařízení FACTS (Flexible AC Transmission systems).
Strategie synchronizace a uplatnění teorie okamžitých výkonů pro měniče na síti
Zkoumali a testovali jsme přímé řízení výkonu PWM (Pulse Width Modulated) měničů připojených k síti, které je založeno na modifikované teorii okamžitého neaktivního výkonu. Vyvinuli jsme také novou variantu FLL (Frequency Locked Loop), která je velmi dobře imunní vůči negativním a harmonickým napěťovým složkám a nevytváří nereálné frekvenční odchylky v případě fázových skoků vektoru síťového napětí. Aplikovali jsme oba koncepty na výzkum strategií řízení měničů připojených k síti. Experimentální výsledky byly vyhodnoceny a porovnány s výsledky simulačních předpovědí získaných na teoretických modelech. Uvedený obrázek znázorňuje testovanou laboratorní sestavu simulátoru trojfázové sítě a řídicího systému pro synchronizaci a řízení výkonového elektronického měniče v síti distribuovaných zdrojů energie.
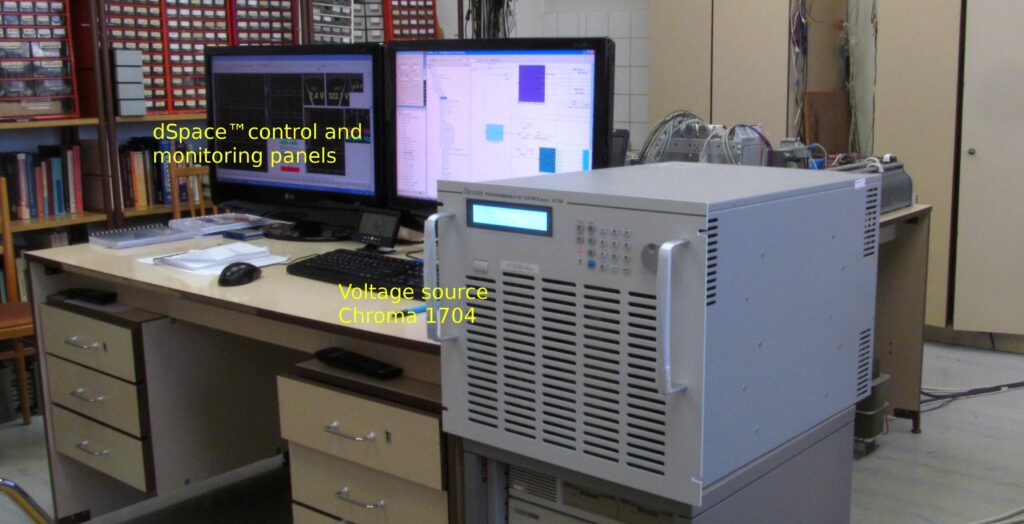
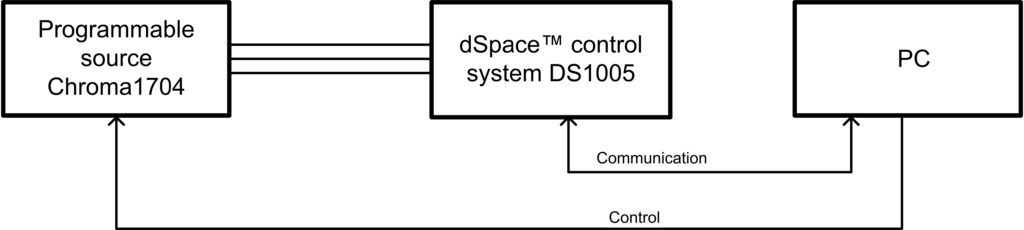
Obr. 1. Uspořádání experimentu v laboratoři
Efektivní metody řízení výkonů měničů na síti
Byly navrženy metody řízení vyvinuté buď bez často přijímaných zjednodušujících předpokladů, nebo za podmínek, které jsou méně předvídatelné, a tudíž takto získané analýzy mohou doplnit dosavadní výsledky výzkumu. Orientovali jsme se zejména na prediktivní metody řízení měničů na síti, zejména na zobecněné prediktivní řízení (GPC), které jsme analyzovali, provedli simulační experimenty a sestavili základ experimentálního pracoviště. GPC je založeno na přenosových funkcích modelu soustavy i poruch. Poruchový model lze chápat jako začlenění pozorovatele, což zlepšuje potlačení rušení v regulační smyčce. Cílová funkce obvykle zahrnuje ještě také člen změny vstupních veličin, což ovlivňuje dynamiku řízení. Byly provedeny experimentální práce zaměřené na chování měniče (řízení činných a jalových výkonů vyměňovaných mezi ním a sítí) v případech poruchových jevů v síti.
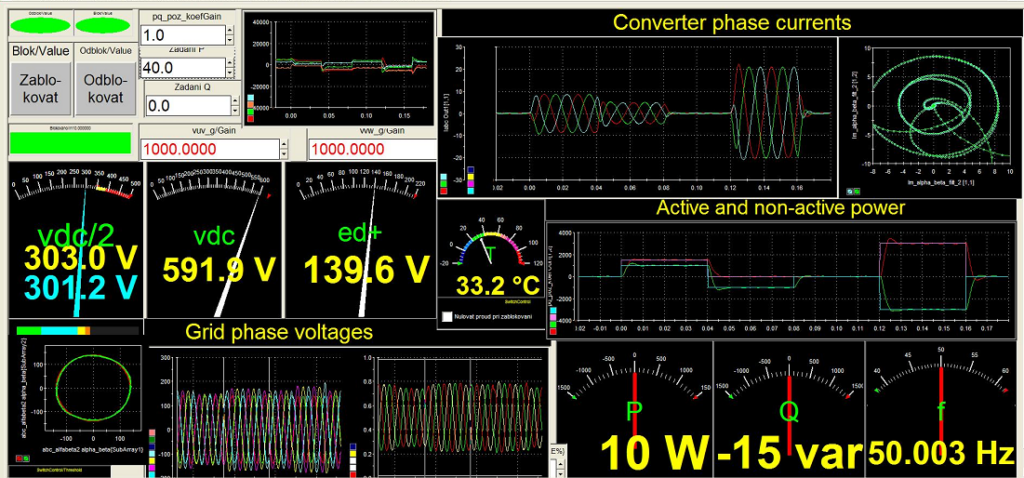
Obr. 2. Uspořádání řídicího panelu v systému dSPACE™
Řízení sedmihladinového napěťového měniče
V rámci smluvního výzkumu s Elektrotechnika, a.s. jsme se řešili speciální variantu sedmihladinového (7L) třífázového napěťového měniče s plovoucími kondenzátory. Oproti standardnímu 7L měniči zde mají tři z pěti plovoucích kondenzátorů v každé fázi podstatně zmenšenou kapacitu. Důvodem pro toto řešení je především snížení výrobních nákladů, zmenšení zastavěného prostoru a hmotnosti měniče. Podstatná výhoda 7L měniče spočívá vtom, že pro napětí sítě 6 kV není nutné sériové řazení IGBT spínacích prvků (Uces= 4,5 kV, spínače Sx na schématu).
Protože tento měnič nelze řídit jako běžný měnič s plovoucími kondenzátory, museli jsme vyvinout vlastní řízení, které kombinuje čtyřhladinovou PWM modulaci se sedmihladinovým balancováním napěťových hladin. Řízení měniče jsme tvořili od úvodních simulačních studií, přes návrh hardwarové části a vývoj softwarové části, jejich testování na laboratorním modelu, až po spolupráci při realizaci průmyslového pohonu na síti 6 kV.
Zákazník již aplikoval tyto měniče ve svých zakázkách pro pohon ventilátorů a pro pohon těžních strojů.
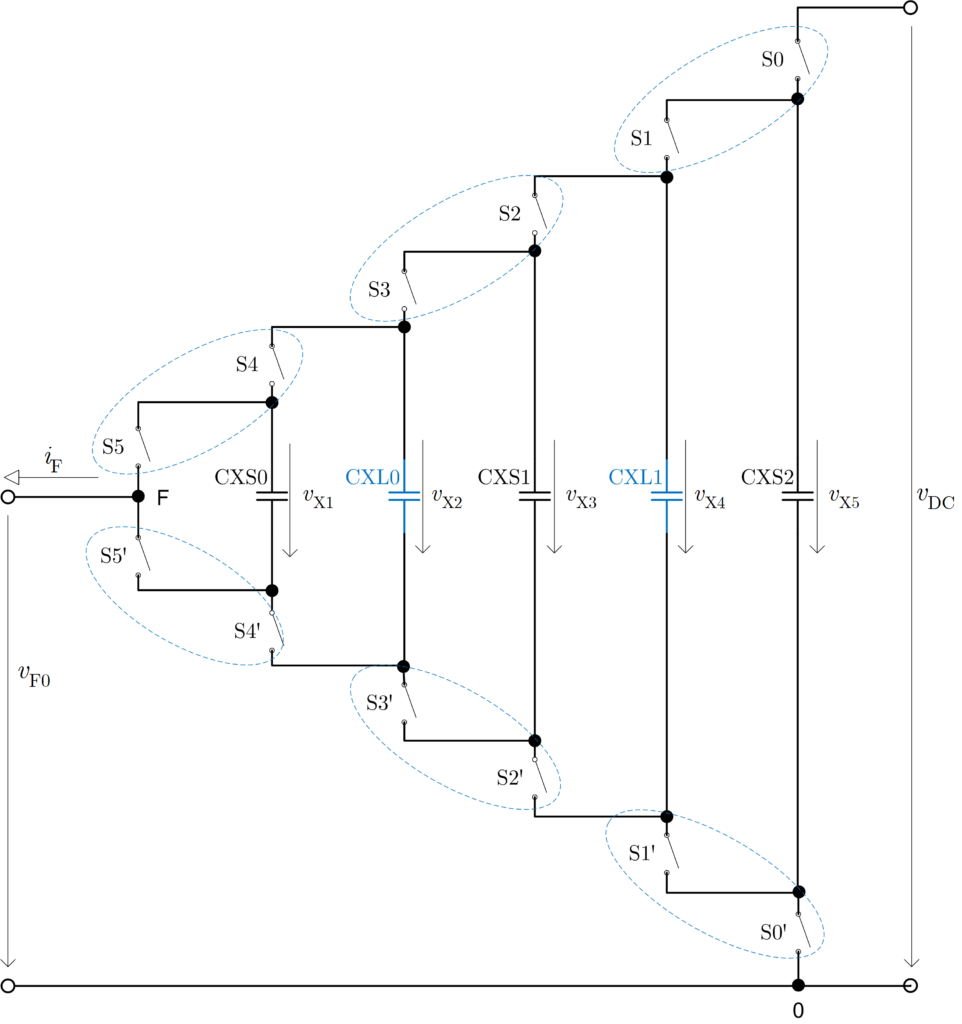
Obr. 3. Topologie jedné fáze 7L měniče
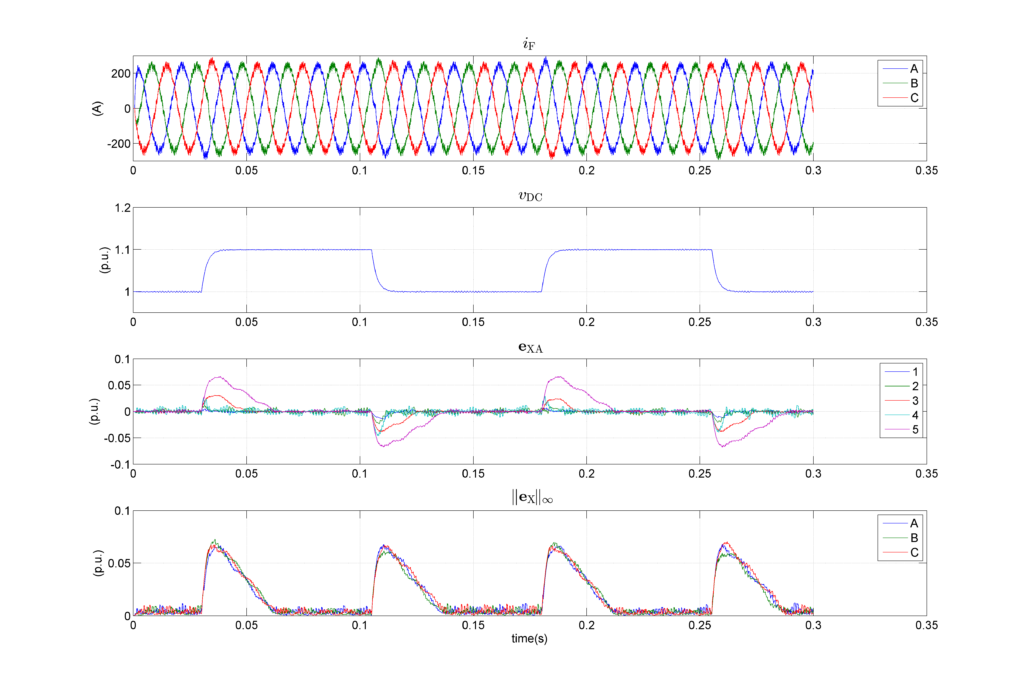
Obr. 4. Ukázka simulovaných průběhů veličin měniče
Komplexní pohon těžního stroje
V rámci smluvního výzkumu s Elektrotechnika, a.s. jsme vyvinuli software pro řízení těžního pohonu se synchronním motorem (SM). Pohon je řízen nepřímým měničem kmitočtu, který je složen ze dvou sedmihladinových měničů. K distribuční síti 6 kV je připojen měnič, který funguje jako pulzně řízený usměrňovač (AFE). Druhý měnič napájí motor napětím s proměnným kmitočtem. Každý měnič je řízen samostatným regulátorem a oba jsou propojeny s nadřazeným systémem pomocí sběrnice EtherCAT. Pro řízení synchronního motoru jsme zvolili princip vektorové regulace momentu a magnetického toku motoru, která je orientována vektorem spřaženého magnetického toku statoru. Regulaci otáček a polohování hřídele motoru zajišťuje nadřazený systém EtherCAT Master. Zařízení AFE řídíme pomocí vektorové regulace proudu odebíraného ze sítě, která je orientována vektorem napětí sítě 6 kV.
Na základě zkoušek těžního stroje byly do řízení pohonu doplněny další funkce, zejména pro snížení ztrát v měničích, pro zjednodušení prací při uvádění do provozu a pro eliminaci mechanických nepřesností vznikajících při montáži pohonu.
Řízení pro oba měniče jsme tvořili od úvodních simulačních studií, přes vlastní vývoj software, jeho testování na laboratorním modelu, až po spolupráci při realizaci průmyslového pohonu 6 MW na síti 6 kV.
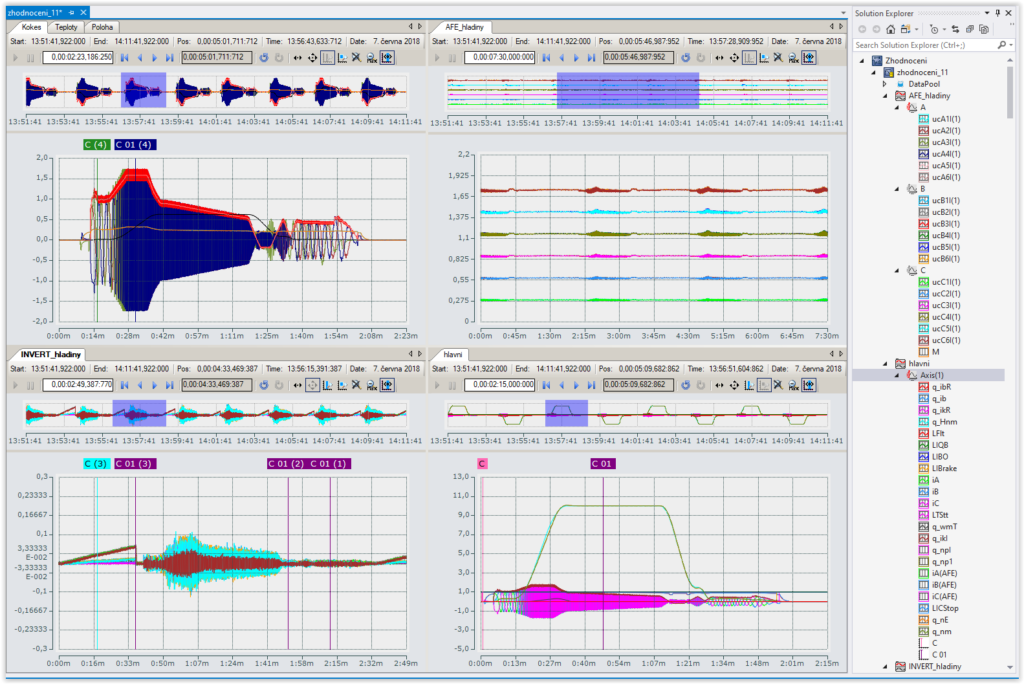
Obr. 5. Příklad monitorování provozu těžního pohonu systémem Beckhoff TwinCAT

Obr. 6. Synchronní motor 6 MW při zkouškách na zkušebně
Výběr z vybavení:
- řídicí systém dSPACE D1005
- MATLAB/Simulink/toolboxy (SimPowerSystems, DSP, Control)
- dvou-, čtyř- a sedmihladinové experimentální měniče na nízké napětí
- dynamometr 120 kW/3000 ot/min
- osciloskopy LeCroy, Tektronix, Rohde&Schwarz
- vývojové prostředky pro mikroprocesory TI řady C6000
- programovatelné i neprogramovatelné výkonové zdroje napětí (např. Chroma, Elfis, natáčivý autotransformátor MEZ)
- analyzátor výkonu Yokogawa, programovatelné zátěže ZSAC
Ing. Martin Čerňan, Katedra elektroenergetiky FEL ČVUT
Techniky zmírňování kolísání napětí v průmyslové síti s EAF (Electrical Arc Furnice) s použitím SVC (Static Var Compensator) s pokročilým řízením.
Práce se zaměřuje na možnosti zdokonalení řídicího systému SVC pro efektivnější snížení efektu kolísání napětí. K ověření vlastností navrhovaných technik se používá experimentální laboratorní vybavení. Pro simulaci dynamického chování EAF jsou použita data měřená ze skutečného provozu, která jsou implementována do experimentu pomocí VSC.
Školitel specialista: prof. Ing. Viktor Valouch, CSc., studium zahájeno 2014, obhajoba 2021.