
Cílem bylo vyvinout experimentální uspořádání pro studium vlivu radiální složky rychlosti proudění na aeroelastickou stabilitu kaskády lopatek. Radiálního proudění je dosaženo pomocí sekundárního (bypass) tunelu, připojeného k hlavnímu tunelu.
Proudění kanálem kolem kaskády lopatek s pevnými lopatkami ve spodní části a volnými konci v horní části bylo zkoumáno pomocí techniky PIV.
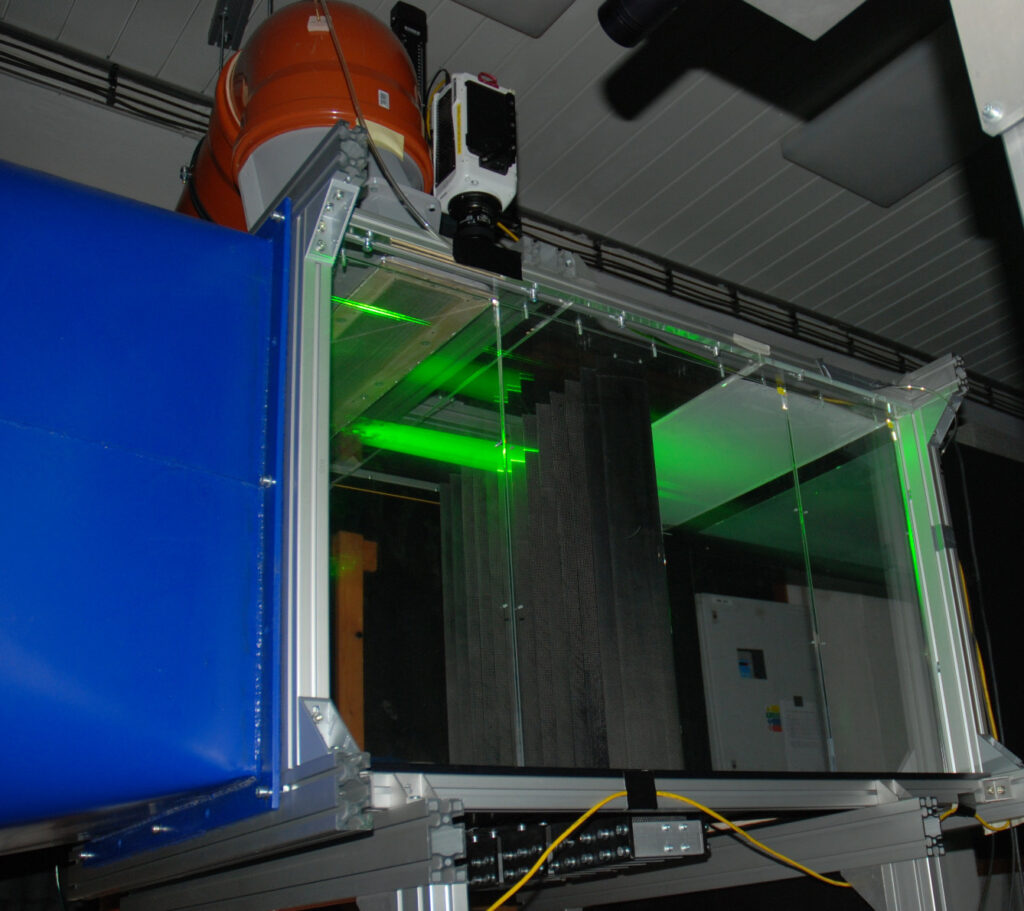
Obrázek 1a – Měření technikou PIV v horizontálních rovinách
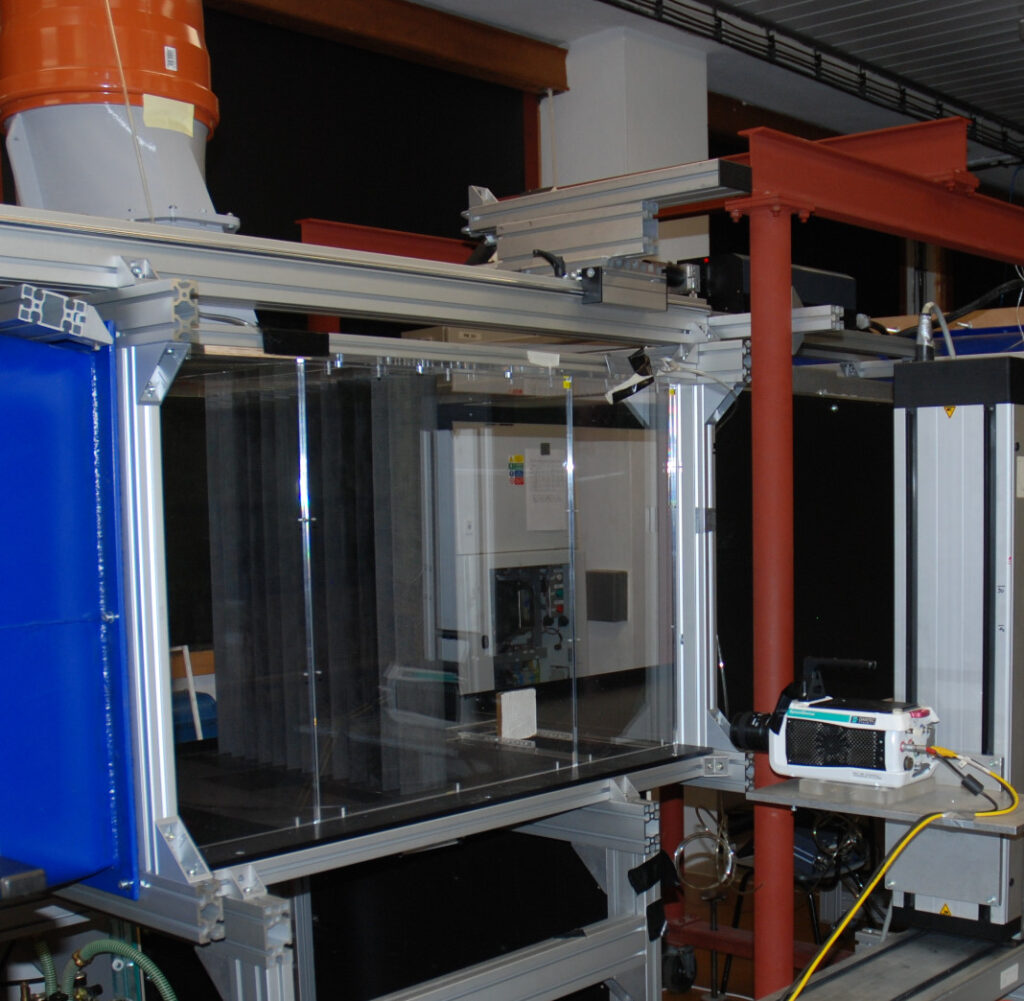
Obrázek 1b – Měření technikou PIV ve vertikálních rovinách
Pro zajištění kvality proudění byl obtokový průtok testován bez lopatek, aby se prokázalo rovnoměrné rozložení rychlosti. Pro stabilizaci proudění byla přidána jemná síta a dvě voštinové desky, které potlačily velké víry, což vedlo k výrazně stabilnějšímu proudění. Nakonec byla použita vizualizace pomocí kouře k posouzení velikosti radiální složky proudění při různých poměrech hlavního a sekundárního proudění.
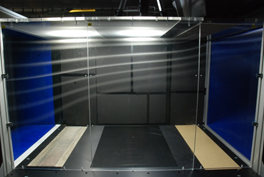
Obrázek 2 – Vizualizace proudění pomocí kouře, průtok bypassem nastaven na 20 % průtoku hlavním kanálem
Měření volného flutteru
Začali jsme volnými testy oscilace kaskády lopatek, při nichž byly lopatky na jedné straně upnuty ke dnu a na druhé straně volné. Reakce kaskády lopatek na nestabilitu proudového pole byla zkoumána pomocí rychlé CMOS kamery (vzorkovací frekvence 1 kHz). Okamžité snímky konců lopatek byly analyzovány pomocí metod zpracování obrazu. Počáteční testy prokázaly, že obtokový proud způsobuje vibrace lopatek upevněných na spodním konci a volných na horním konci.
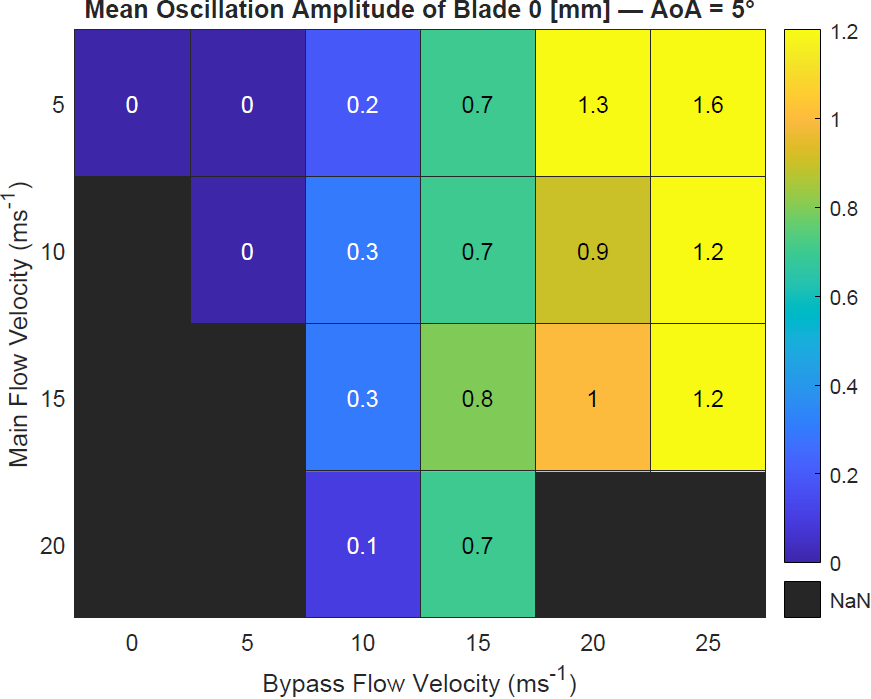
Obrázek 3 – Průměrná amplituda kmitání lopatky 0 pro různé kombinace rychlostí hlavního tunelu a obtokového tunelu
Řízený flutter a přístrojové vybavení
Tato fáze vyžadovala aktivní řízení pohybu lopatky za účelem simulace postupných vln pomocí dvojice elektromagnetů. Elastické zavěšení využívá dva ploché kovové plechy a kovovou tyč, které tvoří speciální paralelogram, umožňující pohyb kolmo k tětivě a rotaci, přičemž omezuje pohyb ve směru tětivy. Pohyb každé lopatky je zajištěn párem elektromagnetů, které dokáží pohybovat lopatkou v obou stupních volnosti. Pod každým z elektromagnetů je snímač síly pro měření budicí síly. Řídicí systém byl vyvinut a otestován v prostředí Simulinku a běží na platforme dSPACE SCALEXIO.
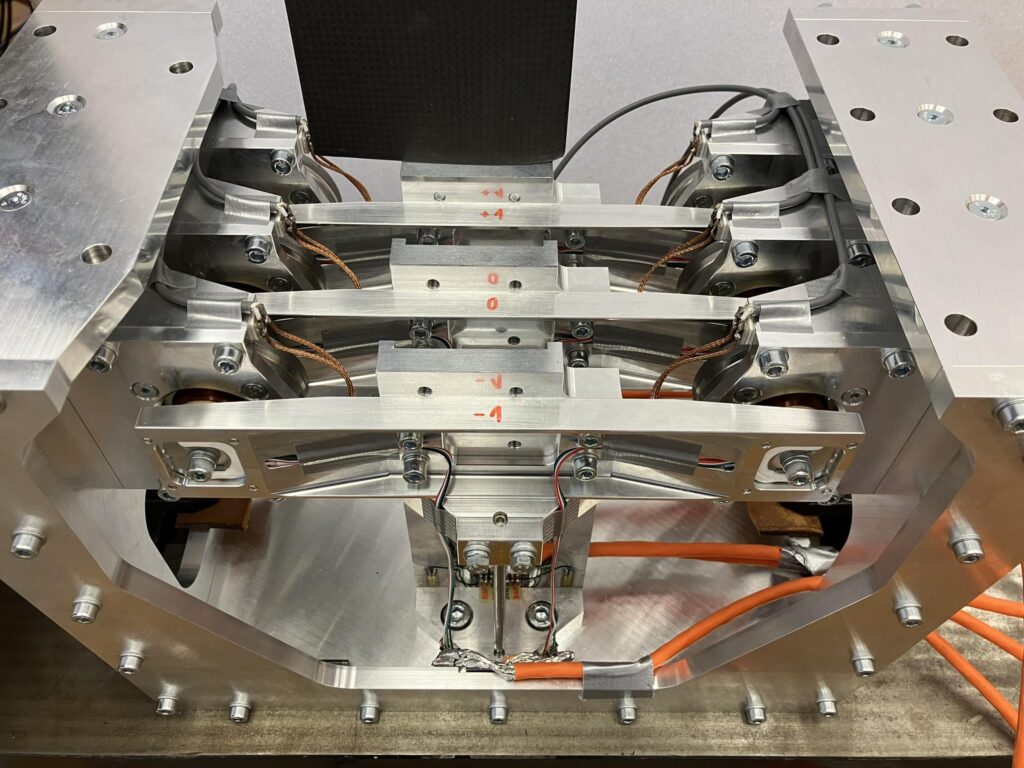
Obrázek 4 – Soustava elastického zavěšení s elektromagnety a tenzometrickým měřením